

有趣的是,这套模型并没有采用深度学习算法。
在生态上一向强大的英伟达又进一步深入了自己在训练模型上的布局。
据报道,英伟达在西雅图机器人实验室开发出了一种新的算法——6-DoF GraspNet,其能让机器人抓取任意物体。

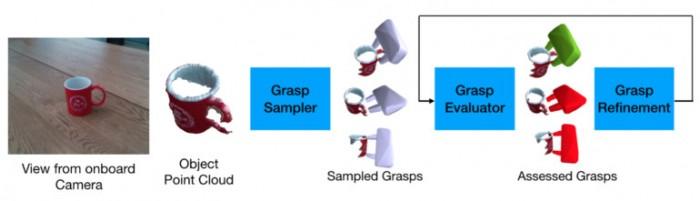
具体工作原理如下:
首先,机械手“观察”物体并规划好在6D空间(空间中的x、y、z坐标平面和旋转三维空间)中的移动路径,随后调用该算法,算法生成一组可能的握持器并根据需求进行移动,然后握持器的运行需调用“握持评估器”,该评估器会为每个可能的握持分配一个分数。最后,握持评估器通过局部变换调整握持变量进而提高最佳握持的成功率。
这里面,英伟达采用了NvidiaFleX评估法,它是一种基于粒子的模拟技术,可以实时生成视觉效果。
英伟达的研究人员表示,6-DoF GraspNet有三大优势,首先,它可以用来抓取任意物体;其次,它的模块化使得其可以用于各种计算机视觉应用和运动规划算法;第三,它可以跟一个模型一起使用,该模型可根据各种物体的“点云”来分配形状,而这将能确保机械臂不会跟任何障碍物相撞。
据悉,英伟达计划在韩国举行的2019年计算机视觉国际会议上展示这套6-DoF GraspNet。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
特别声明:以上文章内容仅代表作者本人观点,不代表新浪网观点或立场。如有关于作品内容、版权或其它问题请于作品发表后的30日内与新浪网联系。









