

集微网消息,2014 年,亚马逊开始在仓库中全面应用 Kiva 机器人,提高物流处理速度。Kiva 它就像一个放大版的冰壶,顶部有可顶起货架的托盘,底部靠轮子运动。

Kiva 依靠电力驱动,可以抬起最多重 3000 磅(约 1.3 吨)的货架,并根据远程指令在仓库内自主运动,把目标货架从仓库移动到工人处理区,由工人从货架上拿下包裹,完成最后的拣选、二次分拣、打包复核等工作。之后,Kiva 机器人会把空货架移回原位。
Kiva 机器人也被用到了各大转运中心,目前亚马逊的仓库中有超过 10 万台 Kiva。如何让工蚁们不在搬运货架的过程中相撞?今天的专利将为你解密!
在17年9月11日,亚马逊申请了一项名为“基于机器人流量密度的引导”的发明专利(申请号:201780062267.5),申请人为亚马逊技术有限公司。
根据目前公开的专利资料,让我们一起来看看仓库货运机器人是如何避免在行驶中碰撞的吧。

如上图所示为库存系统环境的直观图。其中移动驱动单元可在其中操作库存系统的部件。库存系统可以包括管理设备、多个移动驱动单元、多个库存存放容器以及多个库存站。
移动驱动单元可以响应于由管理设备传送的命令,在工作空间内的各点之间运送多个库存存放容器。每一库存存放容器都可存储一种或多种类型的库存物品。因此,库存系统能够在工作空间内的各位置之间移动库存物品,以促进库存物品的进入、处理和从库存系统的移除等其他任务的完成。
其中,移动驱动单元可以实现为独立的、自供电的机动设备,其被配置为在工作空间内到处移动。它包括多个机器人手臂、轮子、摄像头、位置传感器等。这些部位可以在机器人的运行过程中发挥各自的功能,轮子帮助机器人移动,摄像头及位置传感器帮助机器人识别当前的环境以检测位置和障碍物,而机械手臂则用于搬运货物。
在了解了机器人工作环境的直观图以后,我们来详细说明基于流量密度引导的机器人货运系统。
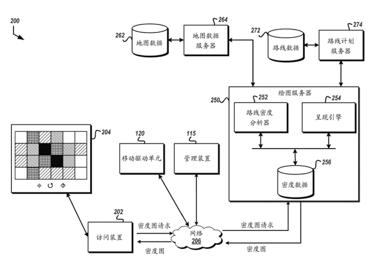
如上图所示为流量密度引导系统的直观图。流量密度引导系统可以基于当前和历史移动驱动单元路线,生成流量密度图。路线数据可以存储在路线数据存储设备中,并经由路线计划服务器访问,可以提供路线计划服务器以标识移动驱动单元在工作空间内的最佳路线。
最佳路线可以包括考虑每个移动驱动单元的位置、移动驱动单元的能力、库存存放容器和由各个库存存放容器中存放的物品、工作空间内的由移动驱动单元携带的物品的目的地(例如,包装以供装运或转移到另一工作空间),以及库存系统或其中的实体的其他可检测特性。
其中该系统使用地图数据来表示工作空间。地图数据可以存储在地图数据存储设备或系统中。地图数据可以包括工作空间的图像、工作空间的地理空间注释(例如位置标记)、工作空间的各部分的高度数据(从而标识例如坡道、楼梯或其他高度变化)。
绘图服务器可以被包括在流量密度引导系统中,以生成基于流量密度的引导信息;系统经由网络来交换访问设备和绘图服务器之间的通信;为了给访问设备生成流量密度图和相关联的流量密度信息,绘图服务器可以包括路线密度分析器。而整个系统就是在这样的每一个部件的关联下完成的,从而达到基于机器人流量密度引导而避免碰撞的目的。
亚马逊在无人货运中的惊人表现离不开这些令人赞叹的发明想法,将机器人搬运货物彻底自动化,不仅提高了工作效率而且降低了成本。希望这些技术也能够在各大快递公司落地,提高货物搬运效率!(校对/Jurnan)









