




来源:
今天是太空与您相伴的【第2521期】
两个航天器于同一时间、在轨道同一位置、以相同速度和姿态会合并在结构上连为一个整体,被称为交会对接。这是建设中国空间站的关键技术,是实现“1+1=1”的前提,也是航天器在轨运行中最复杂的技术之一。它分为交会、对接两个阶段。今天,一起来了解飞船奔赴空间站时,为什么“走走停停”?在对接过程中,又如何“稳稳停靠”于空间站!
交会阶段
01
飞船奔赴空间站时,
为什么“走走停停”?
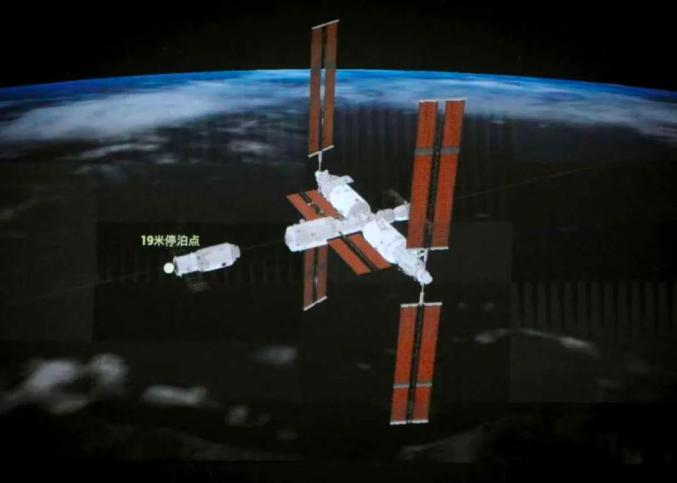
空间站沿圆轨道飞行。飞船追踪过程中,若通过变轨达到空间站同轨道高度的圆轨道上,则两飞行器相对距离和速度保持不变,飞船相对于空间站来说就“停泊”了。这样的“停泊”是由轨道规律保证的,即被动安全,只要不做动作,就没有相撞风险。交会对接飞行过程中设置停泊点是必要的,主要用于以下操作或场景。
01
切换相对测量敏感器
飞船从数百公里追踪至对接,很难由一套设备从头测到底。因此,与空间站相对距离不变且安全的停泊点,是进行不同测量距离的设备切换的最佳位置,即停下来换装备。
02
故障处置
敏感器等典型故障,即可在停泊点等待处置。实际上,有些交会方案将停泊点作为全系统状态检查的点,确认一切正常才放行,即停下来检查。
03
对接时间调整
如轨控执行有误差,则飞行时间与预计也会有偏差,设置停泊点可以“吃掉”此前的飞行时间误差,以保证后续步骤按预定时间计划执行,即停下来纠偏。对于有对接段测控可见等时间约束的交会方案来说,这一调整能力是非常重要的。
04
解决光学敏感器受阳光干扰的问题
通俗地说就是阳光晃眼时在停泊点等待,太阳转过去了再走。停泊点可以设置在空间站的后方,也可以在其前方。从后向停泊点继续接近空间站,需要略降轨,追近后再升轨、停泊。从前向接近则是先升轨,等待空间站靠近后再降轨停泊,正反向分别重复这一过程,直至进入平移靠拢阶段。
02
高精度自动控制条件下,
为什么还要手动交会?
交会有自动与手动两种模式。整个交会飞行建立于轨道计算的基础上。只有到了平移靠拢阶段,航天器的相对运动符合航天员的直接观察、位姿感觉以及操控习惯,“人在回路”即人在控制过程中的参与才能实现。事实上,为了确保安全,即便在这一阶段,正常情况下工程也会利用自动控制系统保持飞行器的基本姿态,航天员只需在此基础上进行平移控制和姿态调整。

但手动,也就是人控交会模式的一大优势是控制精度好,这源自人眼精准的立体视觉和人脑-手指精细的操控能力——航天员经过训练后,可以达到极高的观测和控制精度。在早期的交会对接技术验证时代,受限于当时测量敏感器、控制计算机等设备的技术水平,自控不如人控精度高。苏联曾经在试验新型对接机构时,专门以人控方式完成最后的交会对接操作,以获得更优的控制精度。
当代的自动控制精度足够高且稳定,但人控仍然作为一种冗余手段保留了下来。这是因为机器无法替代人在现场的临机处置能力。两个飞行器非常接近时若发生异常,地面干预的实时性比不上现场的航天员,并且航天员可以进行综合情况的判断和处置,更有利于保证安全。正是基于这一优势,联盟T-13航天员靠手控操作实现了与失控的礼炮-7空间站交会对接,进而维修恢复了空间站。
03
从两天到6.5小时,
快速交会是怎样实现的?
2021年6月17日,神舟十二号载人飞船与天和核心舱形成组合体,交会对接全程时长从过去我国载人飞船通常需要的两天左右缩短至6.5h。

交会过程快,就是要在尽可能少的飞行圈次内,在很少的几个轨道特征点上完成所需的交会变轨。因此,规划的变轨次数少、轨控之间的间隔短,才能有效缩短交会时间,这又对其他条件提出了要求。
01
空间站调相及轨道外推预测精度高,交会飞行的初始条件偏差小。
02
火箭入轨精度高。由于需要调整修正的量小,不必规划太多的轨控次数。
03
测定轨实时精确。在北斗全球导航系统的支撑下,此条件已实现。
04
实时轨控规划与计算精准。在北斗全球导航系统提供实时精准测定轨的前提下,要么飞船的船载计算机运算能力足够高,能够自主进行规划和轨控;要么地面注入轨控参数时段宽裕,注入时刻不构成约束。
05
轨控精度足够高,不会产生新的偏差项,且偏差足够小,不超过规划的调整能力。因此,快速交会的实现是由空间站(合作目标)、运载火箭、飞船(追踪飞行器)、地面、导航与中继卫星等构成的大系统整体能力提升与协同保障的结果。
对接阶段
PART.1
什么情况下可以对接?
交会的终点就是对接的起点。以前向对接为例,此时,飞船相对于空间站的横向位置与速度、三轴姿态与角速度都尽可能接近零,只有轴向飞行方向保持预先设计的接近速度。
神舟十九号载人飞船与空间站组合体完成自主快速交会对接
工程以这些参数的状态作为对接开始的条件,此条件对于飞行控制系统而言是交会控制目标,对于对接系统则是要适应的初始范围。从系统全局来看,交会终点精度越高越好,而对接机构的容差范围则越大越好,这也是系统设计指标在进行分配时需要留余量的界面。这一刻,交会系统完成“交班”,交会对接任务的接力棒交到了对接系统手中。
交会飞行结束时,两个航天器已经实现了“1+1”。接下来的对接将使二者在舱体结构上实现“=1”,成为运动控制、能源、信息、环境等舱内资源“=1”的基础。
PART.2
从单航天器到组合体,对接需要几步?
作为两飞行器完成机械连接并形成刚性组合体的物理过程,对接主要包括3个步骤。
1. 接触、接纳和几何位置校正
两个飞行器的对接机构相互接触后,第一件事就是消除初始偏差,让双方的机械装置相互接纳,并且校正相互的位置关系,实现完完全全的“对正”。这个动作,类似拧螺钉时先对准螺孔的扶正动作。
空间对接的接触面构造类似更加精密的榫卯,通过特定的几何导向特征,让两个航天器对接机构越接近、越对正,从而严丝合缝,你中有我我中有你地结合在一起。位置校正之后,为了使两个航天器的相对关系不再变化,捕获机构将在此时“抓住”对方,使彼此不再脱开。

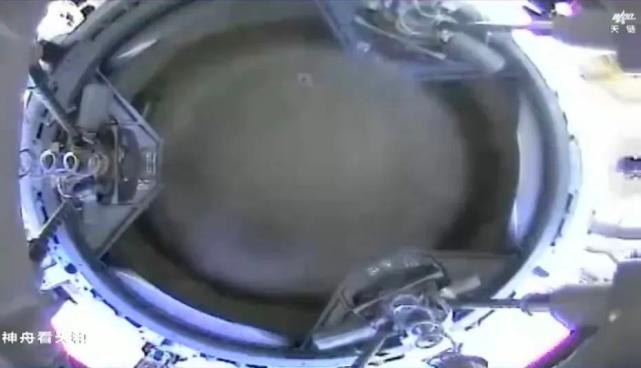
天和核心舱前向端口
2. 缓冲并消耗碰撞能量
高速飞行的大质量航天器,即使以较小速度相互接触,冲击能量也是相当可观的。因此,飞船和空间站中至少一方需要配置缓冲和耗能装置,减缓冲击过载,耗散或吸收撞击能量。自适应电磁装置可以将捕获与缓冲耗能的工作合一,可以实现低冲击捕获,并通过电磁参数的调整控制适应更大范围的对接飞行器质量及对接初始条件。
对接机构捕获
3. 机械连接
两个航天器接触的碰撞能量被缓冲、吸收之后,两对接端面被拉近、靠拢,然后通过机械锁系刚性连接为一体。除了要保证足够的连接刚度和承载能力,对于载人航天器,还要实现两航天器间的密封,以保证人员能够通过两个航天器的对接通道往来。与缓冲系统的配置原则类似,飞船一侧通常配置橡胶密封圈,空间站一侧配置金属密封面。
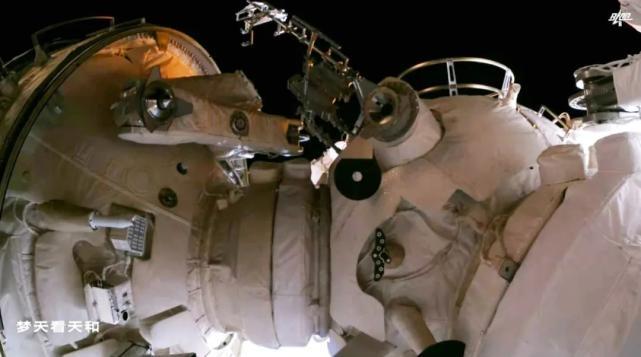
梦天实验舱与天和核心舱交会对接形成组合体
至此,两航天器结构固连合一形成组合体,电路、液路可连通,载人环境贯通,“1+1=1”的物理基础已全部具备。
PART.3
怎样保证飞船不把空间站掀翻了?
对接将产生撞击能量。除了航天器上的缓冲、耗能装置,空间站工程还有几项设计与这一问题相关。
第一,主动对接机构上配置的缓冲阻尼系统,在对接撞击过程中隔离了两个飞行器本身,实际起到的效果相当于以这套系统的等效动力学特性(而不是整个飞行器的特性)去撞击目标。因此,通过对这套系统的动力学参数设计,可对不同的对接目标及各种对接初始条件进行适应。
第二,为了不干扰缓冲阻尼过程,对接接触后两航天器均要停止姿态控制,组合体处于自由漂移状态。此时,缓冲系统不再有额外能量输入,只需将对接撞击能量消耗即可。
第三,对接动力学较难处理的一个问题是偏心条件下的对接,此时需要对接机构有承受较大偏心翻转载荷并吸收该方向输入能量的能力。
交会对接是一个在空间要素上延展分布、在时间坐标上动态发展的复杂系统,是一套通过以控制为核心的技术实现总体最优的工程设计,是一项基于轨道科学规律和航天技术而构建大型空间设施的活动,为航天这一系统工程作出了有力注解。
来源 | 中国载人航天












